¶ Enabling Secondary Development
Secondary development is primarily an option exclusive to the EDU model. It allows you to develop for your robot using both official and unofficial SDKs (that uses DDS middleware under the hood). The key feature is low-level access, enabling control of each joint independently, allowing you to implement your own balancing/walking algorithms. AIR/PRO models do not support this out of the box, but it can be enabled.
Currently firmwares 1.0.19-1.1.11 are supported
To enable:
- You should have root access. Refer to custom RootFS or jailbreak manuals
- Follow the installation instructions in this repository to install package on the Go2 robot itself
- After installation run the
go2_firmware_tools:
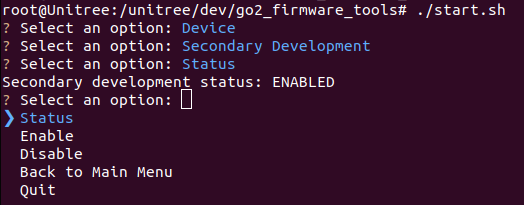
cd /unitree/dev/go2_firmware_tools
./start.sh
- Select
Device -> Secondary Development -> Enableand wait for the process to finish. - Reboot when prompted.
- Check the status by selecting
Device -> Secondary Development -> Status. If you see "Enabled," everything is set up, and you're ready to start development.
- Enjoy!
For versions 1.1.2 to 1.1.11, the only method to enable secondary development is through custom packages. Follow the custom package manual for instructions.